

Remote Spectroscopy – the UVEX Motor Unit
When looking to upgrade from my LISA in 2020, the UVEX had much to recommend it. Its ability to access a broad spectral range was important as was the flexibility to both adjust the grating angle and to swap over gratings to shift between low and mid resolution. However, the key feature was the proposed motor unit. It promised the ability to both change the grating angle and to adjust focus of the M2 mirror remotely. So I bought a first release UVEX and confess that I pestered Francois and his team to send me a motor unit as soon it was commercially released. My unit was shipped to me in October 2022.

Peter Velez
is an Australian amateur astronomer and spectroscopist. Looking for a distraction from his job as a corporate lawyer, Peter studied astronomy at Swinburne University, earning a Masters degree in 2016, which rekindled his childhood passion for all things astro. A project to determine the expansion rate of the universe by observing the quasar 3C-273 with a LISA spectroscope led him down the path of spectroscopy: the journey continues. Peter observes from the iTelescope Facility at Siding Springs Observatory, NSW Australia and devotes most of his time to identifying symbiotic stars and transients.
Observatory & Set-up
My equipment is housed in the iTelescope facility at Siding Spring Observatory, NSW Australia. iTelescope is a commercial operation with facilities around the world. I rent space in an observatory with about 25 other telescopes. The shed has a roll off roof controlled by the iTelescope weather station. I don’t need to concern myself with opening and closing the roof as this is externally managed.
Opposite is a picture of the observatory.


I have a dedicated pier with a PC and web-controlled power switch in a cabinet at the foot of the pier. I access the PC using Teamviewer from my home in Sydney. The mount is a Paramount MX and is controlled with The SkyX. The principal scope is a Planewave CDK 12.5 with an inbuilt focuser. I also use a Takhashi Sky 90 mounted on the main scope for simultaneous photometry.
I use the Alpy guiding unit and Alpy calibration unit. The science camera is an Atik 460EX and the guide camera is an ASI174MM. To be able to access the NIR and IR, I have a ZWO electronic filter wheel with a single filter blocking wavelengths shorter than 5300 A.
Opposite is an image of my rig in the shed. The UVEX motor unit is at the bottom left.
Remote operation and automation
As I take spectra remotely, I need to be as independent as possible. There is an experienced technician on site at SSO to undertake maintenance – but I can’t reasonably ask him to switch my calibration and flat lamps on and off or to change the grating angle or focus at night. Apart from the need to monitor many other systems, it’s a hazardous environment in the dark with scopes much larger than mine slewing about.
The UVEX Motor Unit is a key element of my system.
The ’Holy Grail’ for spectroscopists is automation – the ability to set our systems running, retire to bed and wake the next day to find our hard drives full of data. This is not an easy task – taking spectra is like making risotto. No matter how much preparation you do, it requires constant attention. However, with the right equipment and software – and plenty of patience – you can enlist your computer to watch the risotto for you. I use Voyager Array to manage my system. Others use Prism or custom programs.

The UVEX Motor Unit – integrated calibration control
To produce reliably calibrated spectra, we need to take a spectrum of a calibration lamp before, and often after, each target. Previously I managed this by using a webswitch to control 12V power to the Alpy calibration unit lamps which was cumbersome.
The UVEX motor unit has integrated calibration control. The USIS Controller software provided by Shelyak gives the observer remote control over the Alpy calibration unit – a simple click results in the Alpy unit being ready for flat, calibration, dark and bias frames to be taken.
I rarely use the USIS Controller program. In a welcome development, the Shelyak team have prepared and published the USIS protocol which allows users to write their own software. I have managed to prepare a series of Python scripts that control the Motor Unit. These scripts are called when required by my automation program. So before taking a target spectrum, my system connects to the Motor Unit, turns on the lamp, takes the spectrum, turns off the lamp and disconnects from the Motor Unit.

The UVEX Motor Unit – adjusting the grating angle
Spectroscopy, like life, inevitably requires compromise. With a 600 lines/mm grating, my system yields a range of around 2000 A with resolution of between 1000 and 1700. A 300 lines/mm grating would provide a much wider range but at a significantly reduced resolution. A 1800 lines/mm grating would provide higher resolution but would be restricted to brighter targets. The ability to change the grating angle remotely enables me to achieve a wider range at good resolution.
To illustrate, below is a plot of 3 spectra taken of V618 Sgr, a possible symbiotic star selected from the list of candidates in the Suspected/Misclassified Symbiotics program developed by Dr Jaroslav Merc.
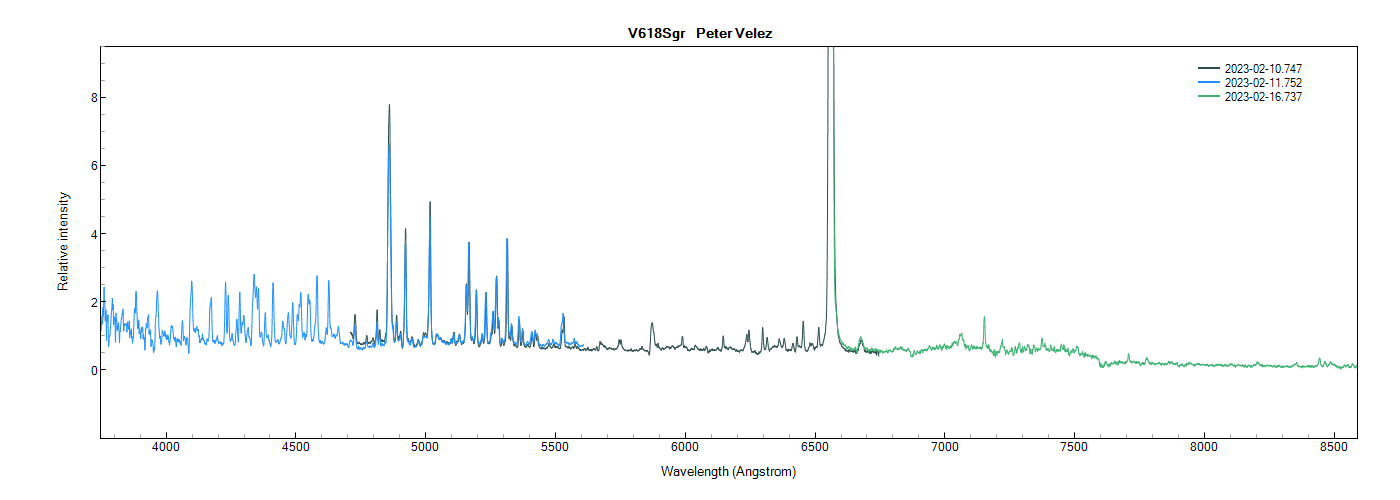
The spectra were taken on 10, 11 and 16 February 2023. The spectral range is 3600 – 8500 A. The resolution ranges from 1037 (in UV) to 1672 (NIR). Its often hard to appreciate the resolution of a spectrum where the plot includes a bright Ha emission. Below is the spectrum centred on the UV/blue region.

These spectra were taken on different nights because the target only passed 30 degrees elevation an hour before sunrise. The same target can be observed with different spectral ranges in the course of the same evening. As with the Alpy calibration unit, I control the grating angle with simple Python scripts. I have settled on 4 wavelength ranges – UV, visual, NIR and IR with some overlap between them. These are called by my automation program when required. The scripts output the starting and ending position for the grating and these data are recorded in my automation program log. I’ve also determined the optimum exposure times for flat and calibration frames for each range. If I want to adjust the grating, I change it, take a sequence of flat frames, slew to my target, take ArNe frames and start imaging.
The USIS Controller software and USIS protocol allows the user to set the grating angle either by reference to the angle or wavelength. The wavelength is in turn set by the grating specification (ie 600 lines, 1200 lines etc) input by the user. What I found was that while the motor operation was repeatable, the reported wavelength didn’t necessarily reflect the actual wavelength. For example, if directed to centre the grating on wavelength 4700 A, the unit in fact took the grating to 4554 A. If I moved to another wavelength and then back to 4700 A, it always returned to the same position – in this case 4554 A. I understand from Shelyak that this is because the gratings themselves are not quite accurately reported. So a 600 lines per mm grating may in fact have 580 or 620 lines per mm hence the error. For me this is not an issue. I notionally ‘calibrated’ my Python scripts by determining the required center position in my script to get the wavelength where I want it.
UVEX Motor Unit – other elements
The UVEX Motor Unit has a number of other useful features. All spectroscopes are subject to some thermal instability. This manifests as a shift in spectra as ambient temperature changes. The UVEX is no exception, though the current release upgraded instrument is quite stable. The UVEX Motor Unit will report the instrument’s temperature on request. This feature is useful to test your instrument’s stability.
The Motor Unit also controls focus of the M2 mirror. I have found the focus of my UVEX is quite steady. Once set, I have not needed to adjust it despite the huge temperature changes through the Australian summer.
Resources
There are a few options for automation software. I use Voyager Array. Others use Prism or customised programs such as Python or Ineos.
I’m not a software developer but I am willing to share the Python scripts I have developed. I can be reached on peter@oblaw.net.au